podívejte se na druhou část tutoriálu Nasir o řídicích systémech!
řídicí systémy se používají k uspořádání a správě komponent tak, aby bylo dosaženo požadovaného stavu nebo výstupu. Samotné slovo „ovládání“ zobrazuje příkaz nad jakýmkoli systémem. Řídí se, když jsou systémy stabilní.
existují dva atributy řídicího systému:
- stabilita
- požadovaný výstup
řídicí systém může být provozován elektricky, mechanicky, tlakem kapaliny (plynu nebo kapaliny), nebo může být kombinací těchto způsobů. V předchozím tutoriálu jsme představili řídicí systémy, jejich princip fungování, proměnné podílející se na fungování řídicích systémů a základní typy.
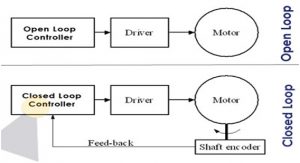
v tomto tutoriálu se budeme zabývat hlavními typy řídicích systémů, a to: systémy s otevřenou smyčkou a systémy s uzavřenou smyčkou. Výukový program se bude zabývat hlavními rozdíly mezi těmito dvěma typy. Podívejme se na základní fungování těchto dvou systémů:
Open loop control systems
open-loop control system bere v úvahu vstup a nereaguje na zpětnou vazbu, aby získal výstup. Proto se také nazývá systém řízení bez zpětné vazby.
v tomto systému nedochází k žádným poruchám ani změnám a pracuje na fixních podmínkách.
systémy řízení uzavřené smyčky
systém uzavřené smyčky se také označuje jako systém řízení zpětné vazby. Tyto systémy zaznamenávají výstup místo vstupu a upravují jej podle potřeby. Generuje preferovaný stav výstupu oproti původnímu. Nenachází žádné vnější ani vnitřní poruchy.
rozdíly mezi řídicími systémy s otevřenou a uzavřenou smyčkou

tyto dva typy řídicího systému mají vzájemný kontrast. Mají odlišnosti, z nichž některé jsou popsány níže:
1. Účinek výstupu
– řídicí systém s otevřenou smyčkou funguje zcela na základě vstupu a výstup nemá žádný vliv na řídicí akci.
– systém řízení uzavřené smyčky zohledňuje proudový výstup a mění jej na požadovaný stav. Řídicí akce v těchto systémech je založena na výstupu.
2. Reakce na vnitřní a vnější poruchy
– řídicí systém otevřené smyčky pracuje za pevných provozních podmínek a nedochází k poruchám.
– řídicí systém s uzavřenou smyčkou se nesetká a nereaguje na vnější poruchy nebo vnitřní změny.
3. Stabilita
– řídicí systémy s otevřenou smyčkou jsou většinou stabilní.
– v systémech řízení s uzavřenou smyčkou je stabilita hlavním problémem.
4. Vliv na zisk
– na zisk nemá žádný vliv.
– neexistuje žádná lineární změna zisku systému.
5. Implementace
– struktura řídicího systému s otevřenou smyčkou je poměrně snadná. Tyto systémy lze snadno implementovat.
– pracovní princip a struktury řídicích systémů s uzavřenou smyčkou jsou poměrně složité a často je obtížné je implementovat.
6. Náklady
– protože systém řízení s otevřenou smyčkou je snadno implementovatelný, potřebuje menší počet komponentů, které mají být konstruovány. Takové systémy vyžadují dobrou kalibraci a menší výkon. Celkové náklady na tyto systémy jsou nízké.
– protože princip je složitý, systém řízení s uzavřenou smyčkou potřebuje větší počet komponent než systémy řízení s otevřenou smyčkou. Tyto systémy poměrně vyžadují menší kalibraci a vyšší výkon. Celkové náklady na tyto systémy jsou vyšší.
7. Příklady
– krokové motory jsou jedním z hlavních příkladů řídicích systémů s otevřenou smyčkou. Automatická pračka je dalším dobrým příkladem.
– televizní dálkový ovladač je nejvýznamnějším příkladem řídicích systémů s uzavřenou smyčkou. Počítačová myš je dalším dobrým příkladem.
závěr
dva typy řídicích systémů, otevřená smyčka a řídicí smyčka jsou od sebe zcela odlišné. Otevřená smyčka je jednoduchá a pracuje na vstupu, zatímco uzavřená smyčka je složitá a pracuje na výstupu a upravuje ji.
v nadcházejícím tutoriálu budeme podrobně studovat analýzu časových domén řídicích systémů. Takže zůstaňte naladěni, abyste měli lepší přehled o řídicích strukturách.
Nasir.